
前回のブログでは超音波センサーを使って物体との距離を感知し動作を止めるプログラミングを紹介しました。
今回はいよいよモーターを使って物体を移動させるプログラミングをやってみたいと思います。
そこで使用するのがMモーターです。
こちらがMモーターです。真ん中の赤い部分が回転し、シャーシに動きを伝えることで様々な動きを作ることが出来ます。
このMモーターにレゴを組み合わせて物を掴むアームを上下させ、物を移動させるキットを作っていきます。
こんな感じでレゴを組み合わせて行きます。作り方はクラスルームアプリに載っているのでそちらを見ながら作って行きます。
上から見るとこんな感じです。
なかなか複雑な組み合わせですね。前回までとはちがいギアの組み合わせ(赤い部分の周りに付いている4つの丸いポッチが2つ噛み合わさった部分)が出てくるのでより正確な組み立てが必要になります。
少しでも組み合わせがズレるとそれだけで動かなくなるので、抵抗なく回転するかを確認しながら作っていきます。
こちらがアームを付ける前段階の完成図です。
レゴの組み合わせでこんなパーツが組み合わされることに感動を覚えます。
そしてアームを付けるとこんな感じになります。
アームが一体どんな動きをするのか楽しみになってきますね。
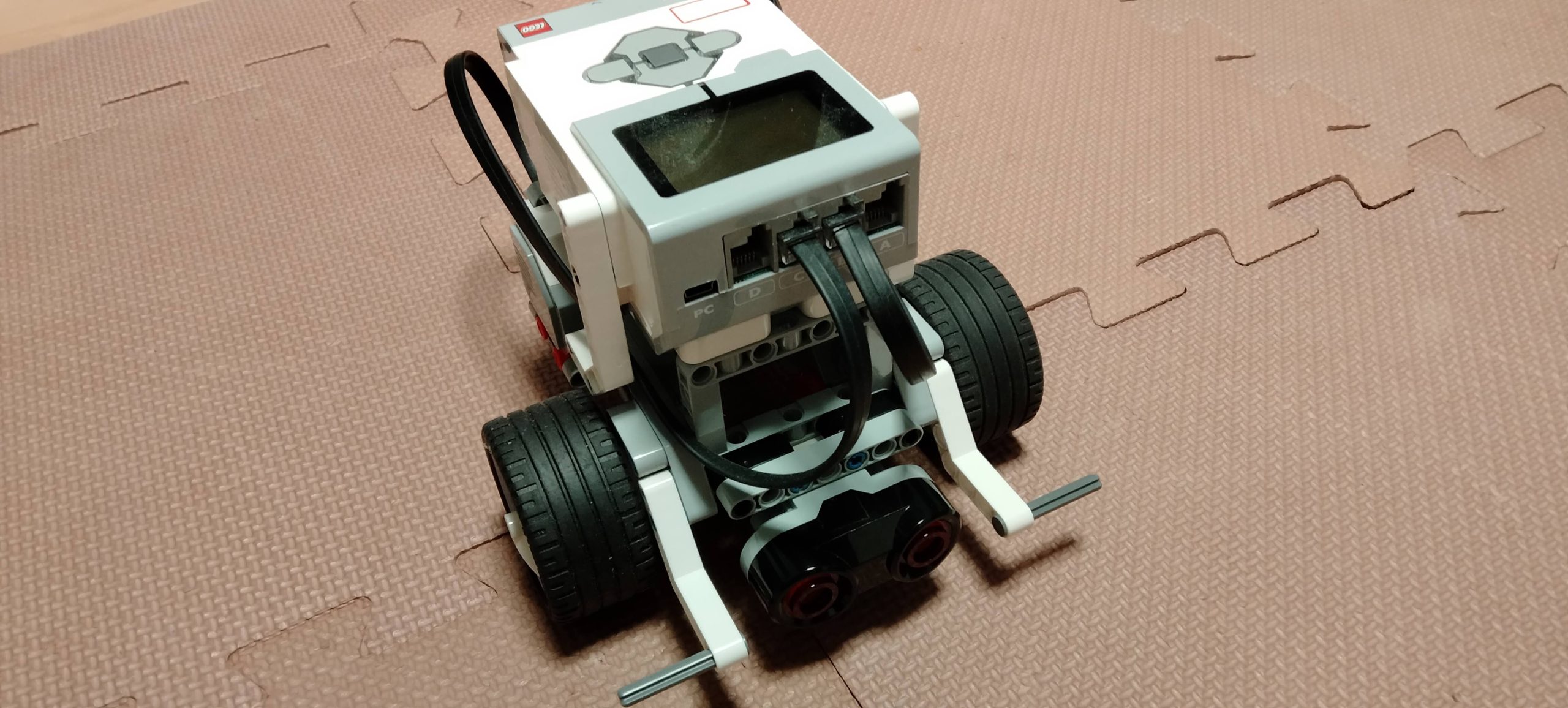
いよいよMモーターとドライビングベースをドッキングさせます。
ここも少し取り付けに苦労しました。MモーターがEV3ブロックの下側に食い込むのでケーブルをEV3ブロックとMモーターに繋げるのに少し苦心します。
完成した姿はかっこいいですね。
ではさっそくプログラムをEVブロックに送ってみましょう。
EVクラスルームの沿ったプログラミングを組んでみます。
スタートが押されたとき→Aのスピードを30%に設定→A左回りを100度の間実行→回転-50%のスピードで右に1秒移動→A時計回りを100度の間実行
ここでAと言うのはAポートを意味します。AポートからMモータへケーブルが接続しているのでAからという命令を与えます
では実行してみましょう。
上手くいきましたね。動きが機敏でかっこいいですね。スピードや回転角度を自由に設計出来るので色々ためしてみると面白いです。
続いて前回使った超音波センサーを取り付けて、前進してから物体を感知して停止し、そこから物体を掴んで左に後方に100度回転して離すというプログラミングに挑戦してみましょう。
スタートが押されたとき→Aのスピードを30%に設定→50%スピードで直進に移動する→4の距離が2センチに変わったら→移動を止める→A左回りを100度の間実行→回転-50%のスピードで左に1秒移動→A時計回りに100度の間実行
というプログラムを実行してみます。
うまく動きましたね。
超音波センサーの感度がまちまちで上手く物を掴むまで何度も挑戦しましたが、上手く出来たときの感動は大きいです。
Mモーター、超音波センサーなどを組み合わせる事により複雑な動きが出来るようになってきます。
ますます今後が楽しみですね。今回はMモーターを使った動きをプログラムしてみました。
コメント