
前回のレゴでプログラミング学習では最も基本の型であるドライビングベースを作って、前進、停止、後進させるプログラミングを紹介しました。
今回はドライビングベースを前進させ、前方に障害物があった場合それを感知して止まる動作をプログラミングしたいと思います。
そこで使用するのが超音波センサーです。

前方に超音波を飛ばし物体に当たりはね返ってくるまでの時間から距離を測ることが出来ます。
この原理は自動車の衝突安全システムの基礎にもなっています。
では、実際に作ってみましょう!
まず障害物にあたる長方体ブロックを組み立てて行きます。ブロックを単純に組み立てていくだけなので5分もあれば完成します。

結構可愛らしい障害物です。
1辺5センチぐらいなので、ドライビングベースを前進させる時に上手く直進方向に置かないと感知してくれません。
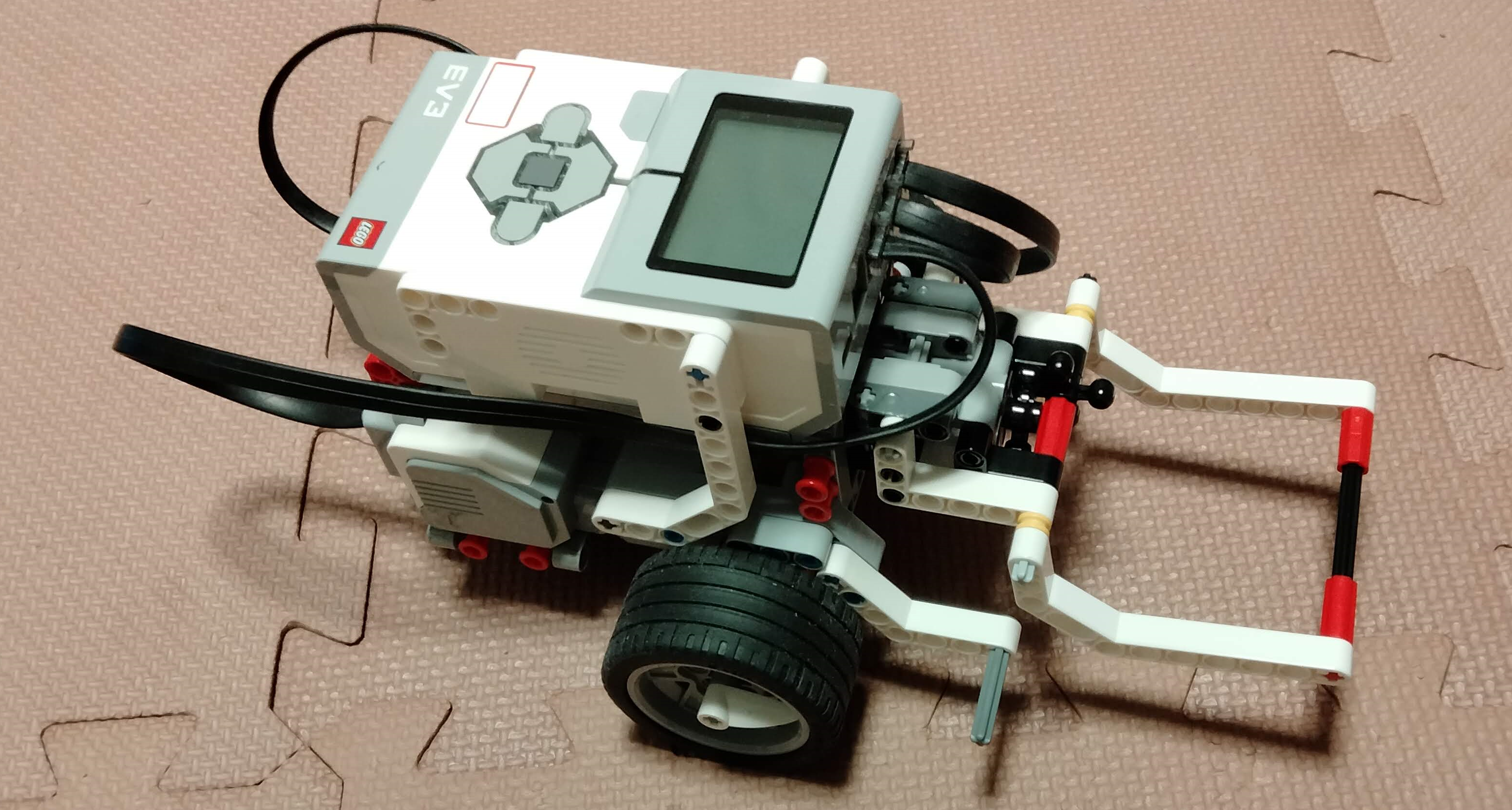
つづいて超音波センサーを組み立て、ドライビングベースと合体させます。
こちらも超音波センサーをドライビングベースに取り付けるだけなので10分もあれば完成します。

ではさっそくプログラミングしてみましょう。
いつものブロックを組み合わせて動きを制御していきます。
スタートを押したとき→移動を開始する→センサーの距離が6センチ以下まで待つ→移動をやめる→1秒待つ→-50%の速度で移動する→センサーの距離が6センチになるまで待つ→移動をやめる
というプログラミングをためしてみます。
上手く動作しました。
では少し追加して
スタートを押したとき→移動を開始する→センサーの距離が6センチ以下まで待つ→0.2秒間60の音を鳴らす→移動をやめる→1秒待つ→-50%の速度で移動する→センサーの距離が6センチになるまで待つ→移動をやめる
をためしてみます。
上手くいきました。
自分が送ったプログラミングを見事に実行してくれると感動とうれしさがありますね。
今回は超音波センサーを使って物体を感知しブレーキをかける動作をプログラミングしました。
次回は物を掴んで離すプログラミングに挑戦したいと思います。
| LEGO 教育版レゴ マインドストーム EV3 スターターセット ※学習カリキュラム付き E31-7703 国内正規品価格:81,290円 (2021/11/25 22:12時点) 感想(0件) |

コメント